Laser scan
Laser scan, nebo též Laserscanning, Laserové skenování či LIDAR (Light Detection and Ranging), je moderní technologie, která umožňuje pořizovat velmi kvalitní prostorová data. Tato metoda využívá principu pulsního bezodrazového dálkoměru, který pracuje s vysokou frekvencí. Laserscanning obecně umožňuje získat velmi podrobná data během krátké doby měření.
LIDAR je metoda, kterou je možné lokalizovat objekty na zemském povrchu s relativně velkou přesností. Metoda je podobná RADARu nebo SONARu, které využívají radiové a zvukové vlny. LIDAR používá laserové světlo. Systém nesený v letadle vysílá paprsek směrem k zemi, kde se odrazí od povrchu zpět do zrcátka, kde systém zaznamená čas, který uplynul mezi vysláním paprsku a jeho příjmem po odrazu. Takový paprsek se může odrazit od jakéhokoli povrchu a odražené signály se pak dělí na FR (First Returns) a LR (Last Returns). First Returns jsou první odrazy, kdy se paprsek odrazí od prvního objektu, který se nachází v jeho cestě. Jedná se tedy většinou o koruny stromů, střechy domů, apod. Naproti tomu Last Returns, nebo též poslední odrazy, pronikají až na zemský povrch.
Po skončení leteckého sběru dat dochází k jeho zpracování. Změřené časové intervaly jsou převedeny na vzdálenosti a jsou porovnány s údaji z palubního GPS, údaji z centrální řídící jednotky letadla a na zemi umístěnou GPS stanicí. Podle těchto údajů lze jednoznačně určit polohu letadla, a to zeměpisnou šířkou, zeměpisnou délkou a nadmořskou výškou.
Další zpracování dat zahrnuje filtrování chyb a zpracování do digitálního modelu terénu či vrstevnic. První filtrace je automatická, která naměřené body třídí do čtyř samostatných datových souborů – body, které se odrazily pouze od země, staveb a vegetace. Čtvrtá skupina představuje chybné odrazy od objektů mimo zemský povrch. Další filtrace je již individuální a je prováděna na základě porovnání dat s dosavadními výškovými modely. Přesnost výsledného modelu je závislá na hustotě získaných bodů. Ta se dnes pohybuje okolo jednoho bodu na čtvereční metr.
Laser scan byl vyvinut v USA, kde má také největší zázemí. V Evropě je vůdčí zemí Švýcarsko, kde začal sběr LIDARových dat již v roce 2000 a od roku 2005 je celé území kompletně pokryto těmito daty. U nás se produkcí LIDARových dat zabývá firma GEODIS, která skenování provádí i na zakázku. Plošné skenování celého území České republiky zajišťuje ČÚZK ve spolupráci s MZe ČR a MO ČR.
Používané skenery lze rozdělit do dvou kategorií, a to na tzv. 2D a 3D skenery. U 2D skenerů je laserový paprsek vychylován pouze v jedné rovině. Bývají nejčastěji neseny letadlem, nebo vrtulníkem. V posledních letech dochází také k rozvoji tzv. mobilních systémů, kdy je skener, nebo soustava skenerů nesena vozidlem. Tyto skenery se používají při získávání digitálního modelu terénu větších území, mapování břehů vodních toků, záplavových území a zejména při dokumentaci liniových staveb. U 3D skenerů je laserový paprsek vychylován do celého zorného pole skeneru. Používají se především při pozemním skenování objektů menšího rozsahu. Využití mají v architektuře, urbanismu, archeologii, při dokumentaci složitých technologických a průmyslových provozů, v dopravním stavitelství a při určování kubatur.
Kvalitu laserového skenování ovlivňuje zejména výška letu, rychlost letu, stabilita letu, meteorologické a klimatické podmínky a také parametry laserového skeneru. S ohledem na fyzikální vlastnosti laserového paprsku a jeho odrazivost od různých materiálů se skenování provádí z maximální výšky 1 500 m nad terénem, kdy lze dosáhnout hustoty sběru bodů až jeden bod na metr čtvereční. Dalším předpokladem kvality je skenování mimo vegetační období, aby paprsky pronikly až k zemskému povrchu. [19] Vzdálenost letových řad se pohybuje v rozmezí od 715 do 830 m. Tím dochází k překryvu letových pásů z 35 až 50 %.
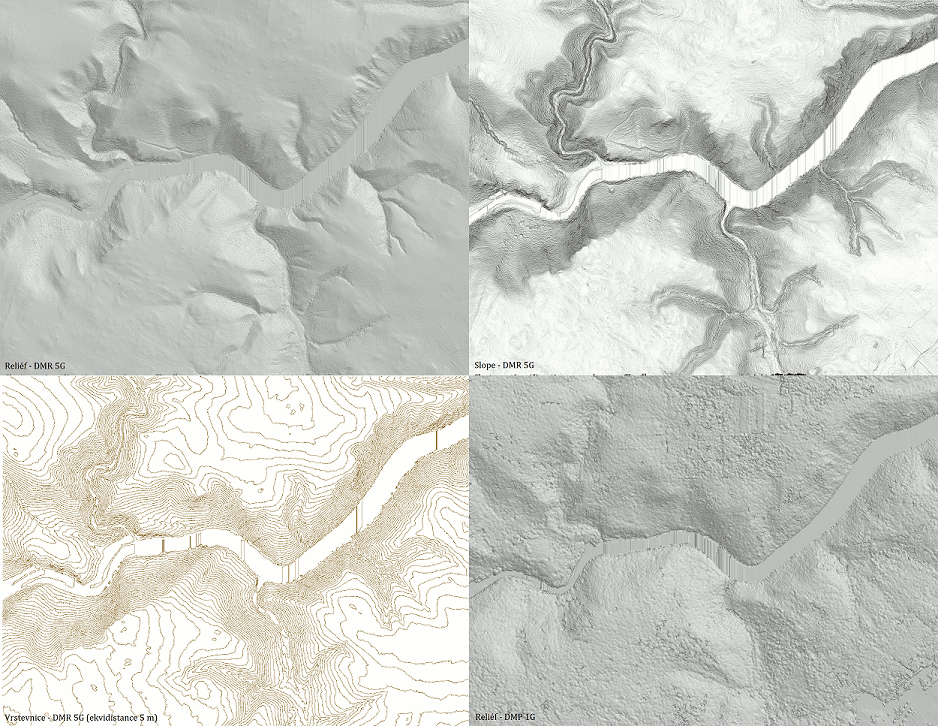
Na obrázku jsou zobrazeny možnosti zpracování laser scanu pomocí programu OL Laser. Z reliéfu snímku jsou dobře patrné vodní toky, příkopy, srázy a při detailním zobrazení také drobné výškové rozdíly. Na obrázku je také vyobrazena svažitost terénu, neboli slope. Na tomto snímku jsou dobře patrné i drobnější liniové prvky a jsou zvýrazněny srázy. Z LIDARových dat je také možné generovat vrstevnice, a to v jakémkoli zvoleném intervalu. Na obrázku jsou vrstevnice s ekvidistancí 5 m. Tento interval se na mapách pro OB používá nejčastěji. Při zpracování dat je možné získat také informace o porostu a zástavbě.
Z laser scanu postupně vznikají nové výškopisné produkty, a to digitální model reliéfu 4. a 5. generace (dále DMR 4G, DMR 5G) a digitální model povrchu 1. generace (dále DMP 1G).
Digitální model reliéfu 4. generace
Tato data představují zobrazení přirozeného nebo lidskou činností upraveného zemského povrchu v digitálním tvaru ve formě výšek jednotlivých bodů v pravidelné síti 5 x 5 m (GRID). Body jsou dány souřadnicemi X, Y a H, kde H reprezentuje nadmořskou výšku v referenčním systému Balt po vyrovnání se střední chybou výšky 0,3 m v odkrytém terénu a 1 m v terénu zalesněném.
Tvorba DMR 4G byla započata v roce 2009 v pásmu Střed a v současnosti je model vytvářen v pásmech Střed a Západ. Pokrývá tak 67,9 % území České republiky. Po dokončení modelu pro celé území ČR (rok 2013) se plánuje průběžná aktualizace produktu. Data jsou poskytována v kladu mapových listů SMO 5, v souřadnicovém systému S-JTSK a výdejním formátem je soubor TXT, který obsahuje souřadnice bodů s odpovídající výškou.
Digitální model reliéfu 5. generace
Tato data se oproti DMR 4G liší v tom, že zemský povrch není reprezentován gridem, ale nepravidelnou trojúhelníkovou sítí bodů (TIN). Střední chyba výšky je 0,18 m v odkrytém terénu a 0,3 m v zalesněném terénu.
Tvorba DMR 5G byla zahájena v roce 2009 a v současnosti je těmito daty pokryto asi 33,4 % území ČR. Po dokončení modelu pro celé území ČR (rok 2015) se plánuje průběžná aktualizace. Data jsou poskytována v kladu mapových listů SMO 5, v souřadnicovém systému S-JTSK a výdejním formátem je soubor TXT, který obsahuje souřadnice bodů s odpovídající výškou.
Digitální model povrchu 1. generace
Tato data představují zobrazení území ČR včetně staveb a rostlinného pokryvu ve formě nepravidelné sítě výškových bodů (TIN) se střední chybou výšky 0,4 m pro přesně vymezené objekty (budovy) a 0,7 m pro objekty přesně neohraničené (lesy a další vegetační pokryv).
Tvorba modelu byla zahájena v roce 2009 a její dokončení pro celé území ČR se předpokládá do konce roku 2015. V současnosti pokrývá DMP 1G přibližně 33 % území ČR. Po dokončení modelu pro celé území ČR se předpokládá jeho průběžná aktualizace. Data jsou poskytována v kladu mapových listů SMO 5, v souřadnicovém systému S-JTSK a výdejním formátem je soubor TXT, který obsahuje souřadnice bodů s odpovídající výškou.





